Abstract
End-effectors in a robotic system generally have the role of executing operations related to manipulating and handling the objects. The traditional grippers are restricted to the scope of performing a specific task, which limits their capability of adapting to changes in the physical properties of the objects. The grippers can become more efficient when integrated with a sub-system catering to manipulating varied sized objects within the existing gripper workspace. Many state-of-the-art methods have used tendon-based and active surface (belt-driven) actuation techniques to effectively change the pose of a wide range of objects within the gripper (in hand). We propose the design of a gripper system that leverages the role of an active surface based actuation technique integrated with an underactuated linkage mechanism capable of performing complex manipulations. We have curated an object list, all having different shapes, and executed experimental rotation and translation of objects. We take help of vision based feedback to accurately execute targeted goal pose motion and additionally demonstrate the gripper's response to mechanical stresses (through analysis) and grasping an object through torque feedback.
Process of Operation
Workflow of the gripper:
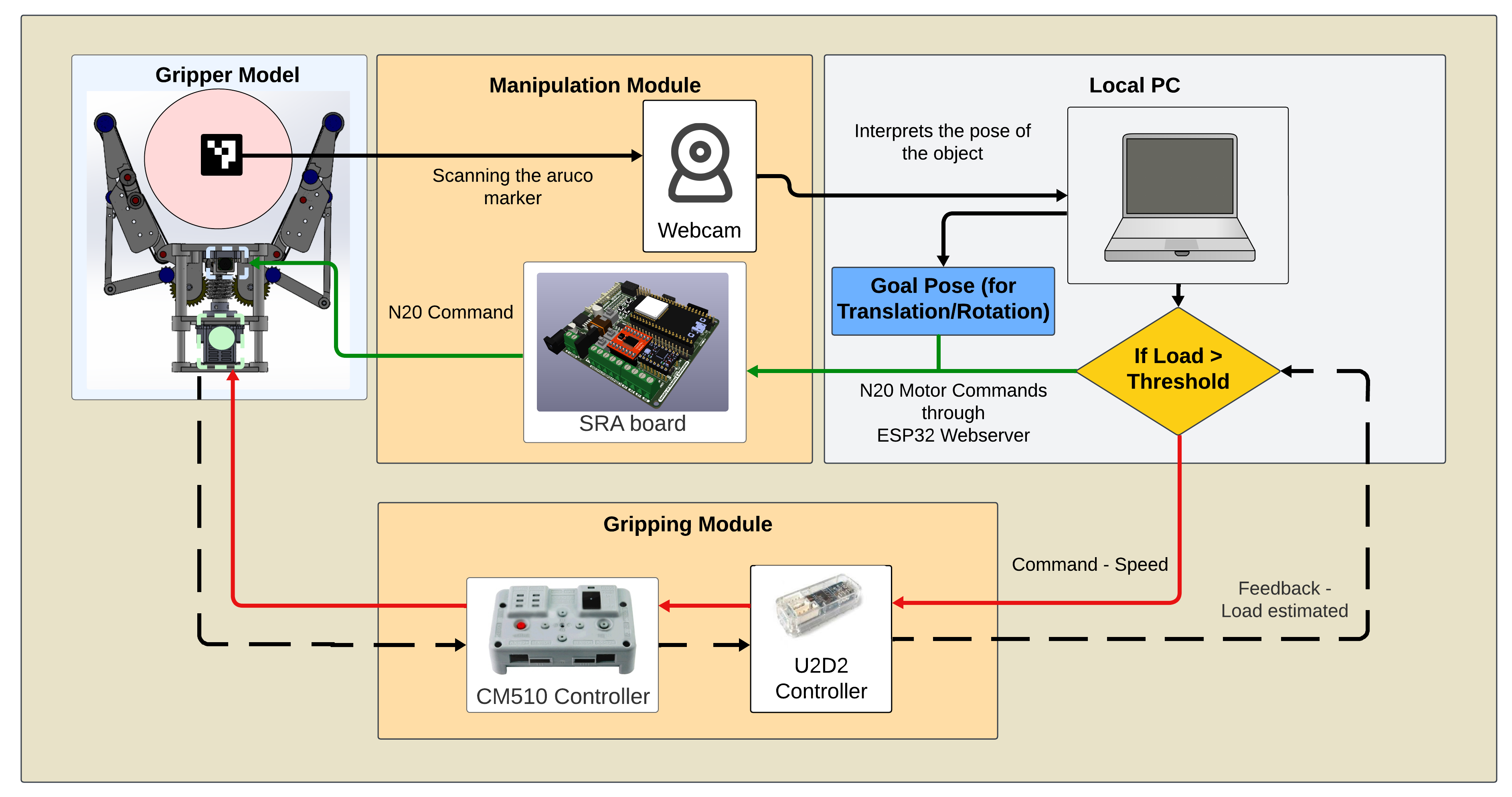
Initially the object is placed on the gripper to test. Then the gripper starts closing once it tightly grips the object. The feedback of grasping passes from the Dynamixel Motor to the CM510 controller which itself transmits the feedback response to the connected monitor. The logic in the monitor would eventually make the fingers stop. Once the object is gripped, the camera scans the aruco markers attached on the object which has a particular set of operation defined for that object to be performed. Based on the type of object, the operations are performed. Continuous tracking of markers takes place and the feedback to stop the operation is sent once the object reaches it's respective goal position.
Experimental Testing:
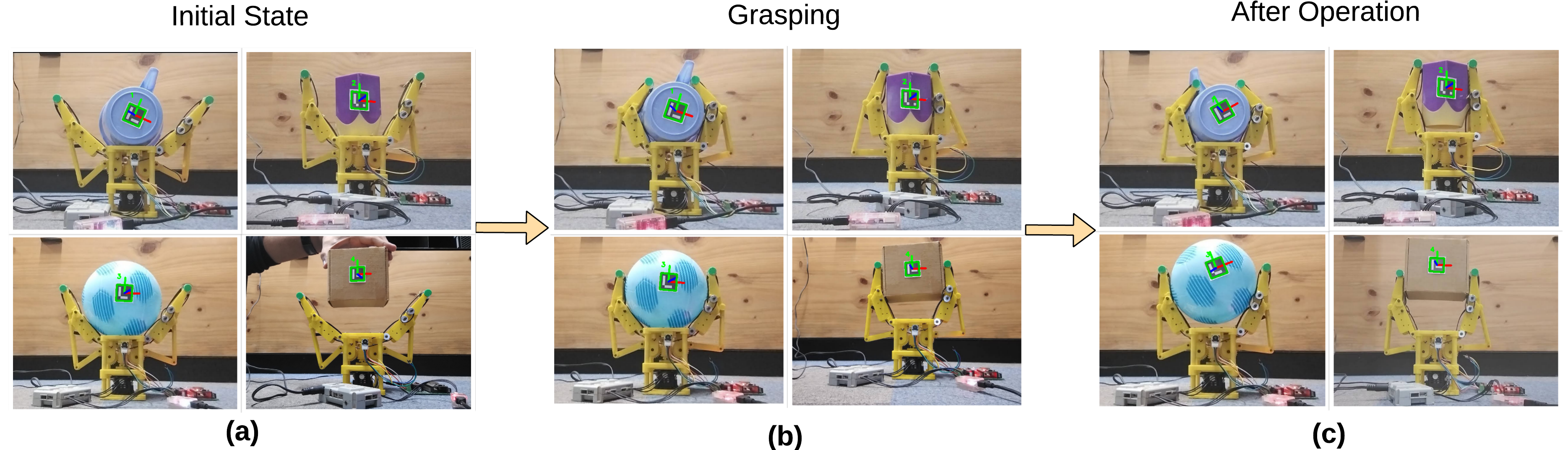
We used different type of objects as our test material, Cylindrical (Mug), Hexagonal (Pen Stand), Spherical (Ball) and Cuboidal (Box) shapes.
Results
Structural Analysis:
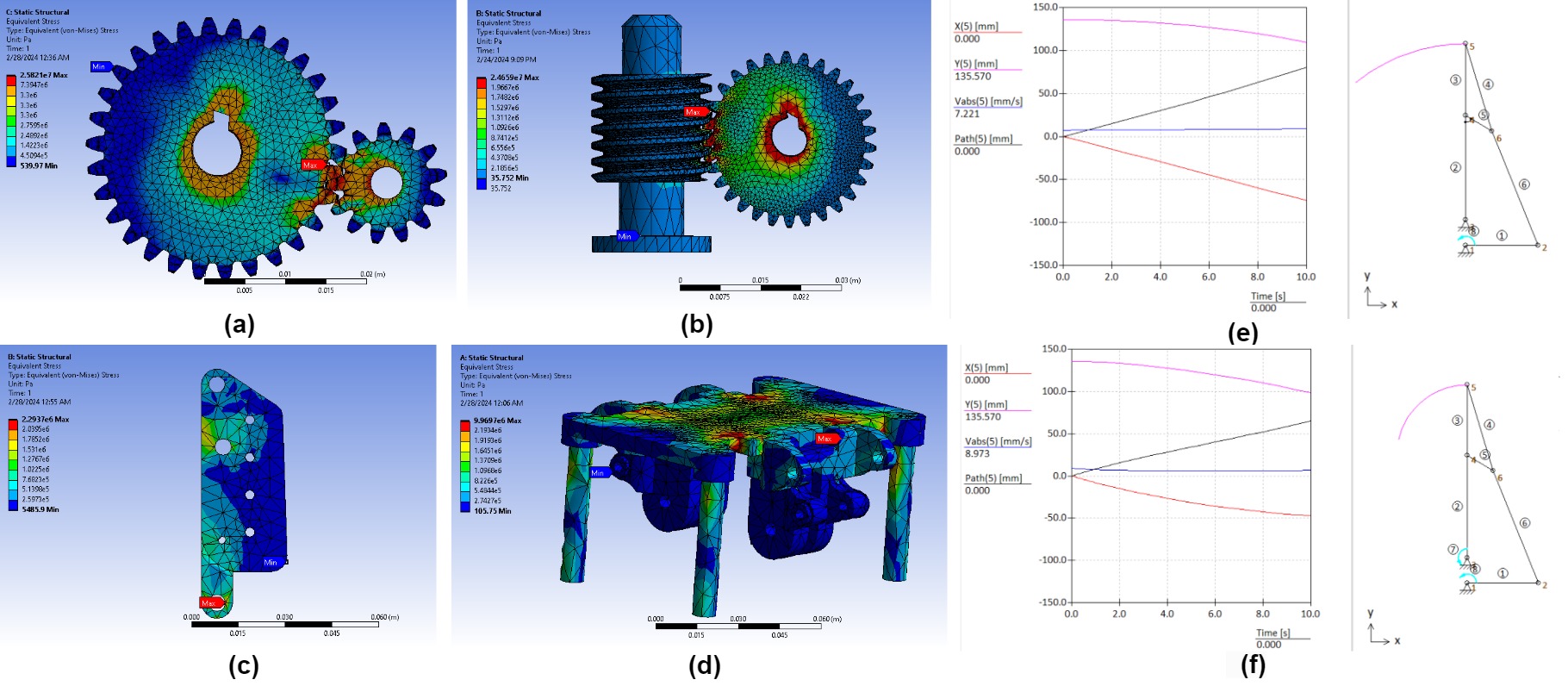
The system analyzed different sections, with specific attention given to the meshing between gears, a critical area due to the 3D-printed nature of the gears. Potential failure points were identified in three areas: the meshing between the worm and 30T spur gear (Fig. a), 30T and 13T spur gears (Fig. b), and the joint of the contact link and the linkage hub (Fig. c). Figure (d) shows the peak stress mainly on the joint interface of the contact link.
In the kinematic analysis of the gripper, two conditions were tested: 1) When the contact link is not obstructed by the object, there is no relative motion between the contact link and the grasping link (Fig. e); 2) When the contact link is obstructed by the object, the grasping link continues to rotate due to the motion of the connecting link (Fig. f). Comparing the plots of both motions, the slope of the position plot is in the range of 8-9 mm/s for Fig. (e) compared to the range of 7-11 mm/s in Fig. (f). The axis of rotation for (e) is node 3, whereas that of (f) is node 5, resulting in faster motion of the gripper when the case is (f) due to the smaller radius of rotation. The motion followed while grasping an object is a combination of both cases (e) and (f).
Load Plot:
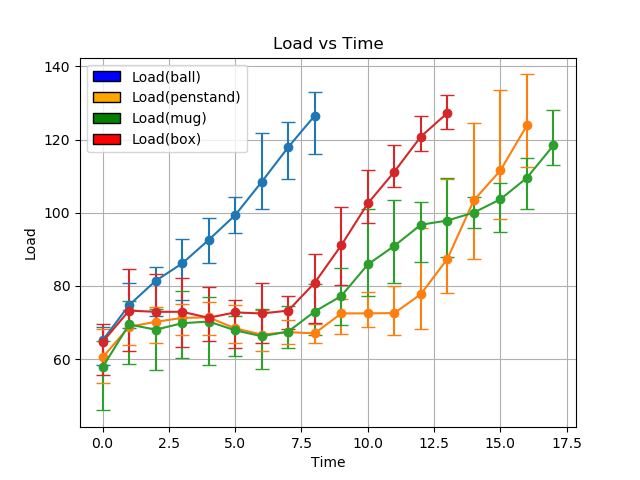
The objects are made to be grasped for 10 iterations from the grip- per's home configuration and the figure highlights the variation in the load values over time. The Y-axis of the plot stating the Load Values are the dynamixel feedback-based load values mentioned. The plot shows that the trend for the ball is steeper than the other objects as the ball comes in contact much earlier due to its size and achieves a higher load value much earlier.
Video
Related Links
There's a lot of excellent work that was introduced around the same time as ours.
D-PALI: A Low-Cost Open Source Robotic Gripper Platform for Planar In-Hand-Manipulation recently published in IROS 2023 highlights the use of two finger gripper working like a finger-thumb mechanism capable of manipulating objects in-hand.
Another interesting work, Variable-Friction Finger Surfaces to Enable Within-Hand Manipulation via Gripping and Sliding, made an effective use of frictional properties of the gripper to grasp the object.
An example of two-finger active surface based gripper was introduced in the paper, Velvet fingers: A dexterous gripper with active surfaces, but this gripper had a bulky and a complex design